【RL】Value-Based Learning
【RL】Value-Based Learning
基于价值学习
Discounted Return
\[ \begin{aligned} U_t& =R_t+\gamma\cdot R_{t+1}+\gamma^2\cdot R_{t+2}+\gamma^3\cdot R_{t+3}+\gamma^4\cdot R_{t+4} \\ & =R_t+\gamma\cdot (R_{t+1}+\gamma^2\cdot R_{t+2}+\gamma^3\cdot R_{t+3}+\gamma^4\cdot R_{t+4}) \\ & =R_t+\gamma\cdot U_{t+1} \end{aligned} \]
Identity: \(U_t=R_t+\gamma\cdot U_{t+1}\)
TD Target
Assume \(R_t\) depends on \((S_t, A_t, S_{t+1})\) \[ \begin{aligned} Q_\pi\left(s_t, a_t\right) & =\mathbb{E}\left[U_t \mid s_t, a_t\right] \\ & =\mathbb{E}\left[R_t+\gamma \cdot U_{t+1} \mid s_t, a_t\right] \\ & =\mathbb{E}\left[R_t \mid s_t, a_t\right]+\gamma \mathbb{\mathbb { E } [ U _ { t + 1 } | s _ { t } , a _ { t } ]} \\ & =\mathbb{E}\left[R_t \mid s_t, a_t\right]+\gamma \cdot \mathbb{E}\left[Q_\pi\left(s_{t+1}, A_{t+1}\right) \mid s_t, a_t\right] . \end{aligned} \] Identity: \(Q_\pi(s_t,a_t)=\mathbb{E}[R_t+\gamma\cdot Q_\pi(S_{t+1},A_{t+1})]\) , for all \(\pi\)
左边是该动作的action-value function,右边含有期望,直接计算比较困难,故利用蒙特卡洛近似计算。
\(R_t\) 近似为观测值\(r_t\), \(Q_\pi(S_{t+1},A_{t+1})\)中\(S_{t+1},A_{t+1}\)都是随机变量,利用观测值\(s_{t+1},a_{t+1}\)近似 \[ R_t+\gamma\cdot Q_\pi(S_{t+1},A_{t+1}) \approx r_t+\gamma\cdot Q_\pi(s_{t+1},a_{t+1}) = TD\ target \] 期望\(\mathbb{E}[R_t+\gamma\cdot Q_\pi(S_{t+1},A_{t+1})] \approx y_t\)
TD learning: Encourage \(Q_\pi(s_t,a_t)\) to approach \(y_t\)
因为\(Q_\pi(s_t,a_t)\)完全是估计,而\(y_t\)部分基于真实的奖励,相对于更加可靠
TD Error
\[ \delta_t=Q_\pi(s_t,a_t)-y_t \]
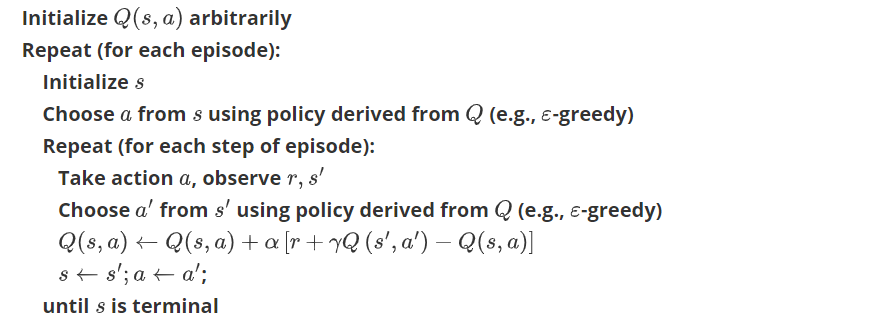
Sarsa
学习目标:更新\(Q_\pi\) 使其更加接近真实值
每一轮迭代更新都依据五元组\((s_t,a_t,r_t,s_{t+1},a_{t+1})\)更新\(Q_\pi\)
因此命名State-Action-Reward-State-Action(SARSA)
更新q-table时采用下一步真实的s‘和a’更新q值,也称为on-policy在线学习
表格形式
State和Action的数量是有限的(离散),通过一个表格来更新\(Q_\pi\)
每次更新表格中的一个元素,使得TD Error变小
- Observe a transition \(\left(s_t, a_t, r_t, s_{t+1}\right)\).
- Sample \(a_{t+1} \sim \pi\left(\cdot \mid s_{t+1}\right)\), where \(\pi\) is the policy function.
- TD target: \(y_t=r_t+\gamma \cdot Q_\pi\left(s_{t+1}, a_{t+1}\right)\). 下一个动作的q值
- TD error: \(\delta_t=Q_\pi\left(s_t, a_t\right)-y_t\).
- Update: \(Q_\pi\left(s_t, a_t\right) \leftarrow Q_\pi\left(s_t, a_t\right)-\alpha \cdot \delta_t\).
算法:
代码实现
1 | class SarsaTable(): |
神经网络形式
价值网络\(q(s,a;w)\)是对动作价值函数\(Q_\pi\)的近似,利用sarsa算法更新网络参数
在actor-critic方法中用于对价值网络的参数进行改进
TD target: \(y_t=r_t+\gamma \cdot q\left(s_{t+1}, a_{t+1} ; \mathbf{w}\right)\).
TD error: \(\delta_t=q\left(s_t, a_t ; \mathbf{w}\right)-y_t\).
Loss: \(\delta_t^2 / 2\).
Gradient: \(\frac{\partial \delta_t^2 / 2}{\partial \mathbf{w}}=\delta_t \cdot \frac{\partial q\left(s_t, a_t ; \mathbf{w}\right)}{\partial \mathbf{w}}\).
Gradient descent: \(\quad \mathbf{w} \leftarrow \mathbf{w}-\alpha \delta_t \cdot \frac{\partial q\left(s_t, a_t ; \mathbf{w}\right)}{\partial \mathbf{w}}\)
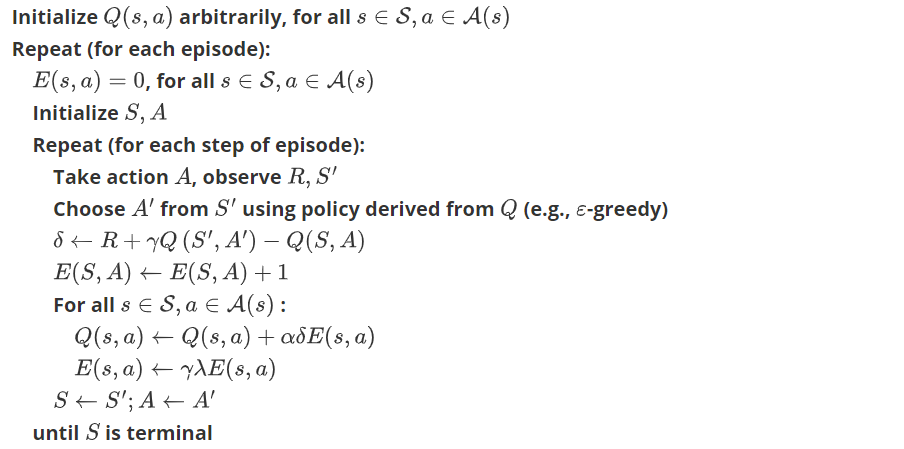
Sarsa(\(\lambda\))
这种方法针对于表格形式Sarsa
Sarsa(\(\lambda\))就是更新获取到 reward 的前 lambda 步. lambda 是在 [0, 1] 之间取值。
不仅更新当前的\(Q_\pi(s_t,a_t)\)同时更新当前回合前面路径state-action的\(Q_\pi(s,a)\)
算法:
代码实现
1 | class SarsaLambdaTable(RL): |
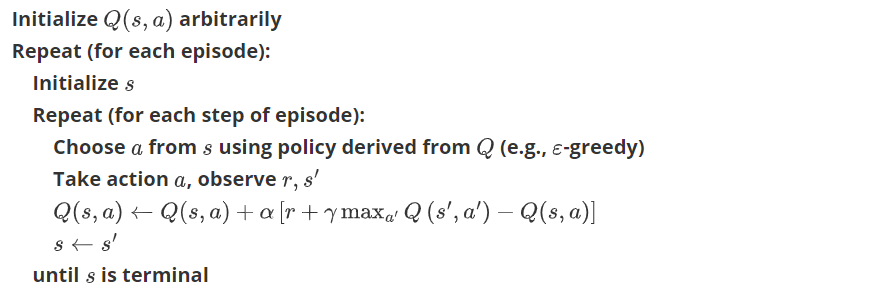
Q-Learning
学习目标
训练最优价值函数\(Q^\star(s,a)\)
TD Target: \[ y_t=r_t+\gamma \cdot \max _a Q^{\star}\left(s_{t+1}, a\right) . \] 利用Q-learning更新DQN
数学推导
通过Sarsa部分推导,对于所有的 \(\pi\), \[ Q_\pi\left(s_t, a_t\right)=\mathbb{E}\left[R_t+\gamma \cdot Q_\pi\left(S_{t+1}, A_{t+1}\right)\right] . \] 如果选择最优的策略\(\pi^\star\) \[ Q_{\pi^{\star}}\left(s_t, a_t\right)=\mathbb{E}\left[R_t+\gamma \cdot Q_{\pi^{\star}}\left(S_{t+1}, A_{t+1}\right)\right] . \] \(Q_{\pi^{\star}}\) 和 \(Q^{\star}\) 都表示最优动作价值函数
Identity: \(Q^{\star}\left(s_t, a_t\right)=\mathbb{E}\left[R_t+\gamma \cdot Q^{\star}\left(S_{t+1}, A_{t+1}\right)\right]\).
动作\(A_{t+1}\)通过以下公式计算 \[ A_{t+1}=\underset{a}{\operatorname{argmax}} Q^{\star}\left(S_{t+1}, a\right) . \]
因此 \(Q^{\star}\left(S_{t+1}, A_{t+1}\right)=\max _a Q^{\star}\left(S_{t+1}, a\right)\).
所以\(Q^{\star}\left(s_t, a_t\right)=\mathbb{E}\left[R_t+\gamma \cdot \max _aQ^{\star}\left(S_{t+1}, a\right)\right]\).
期望直接求比较困难,所以利用蒙特卡洛近似,\(R_t\)利用观测值\(r_t\)近似,\(S_{t+1}\)利用观测值\(s_{t+1}\)近似得到: \[ Q^{\star}\left(s_t, a_t\right)=\mathbb{E}\left[R_t+\gamma \cdot \max _aQ^{\star}\left(S_{t+1}, a\right)\right]\approx\mathbb{E}\left[r_t+\gamma \cdot \max _aQ^{\star}\left(s_{t+1}, a\right)\right]=TD\ Target\ y_t \]
由此,可以利用表格形式学习\(Q_\pi\),针对离散action、state的情况。也可利用神经网络学习\(Q_\pi\) 可以用于连续action、state的DQN方法

表格形式
针对离散状态、离散动作情况,当状态和动作数量变多时,表格会越来越大
- Observe a transition \(\left(s_t, a_t, r_t, s_{t+1}\right)\).
- TD target: \(y_t=r_t+\gamma \cdot \max _a Q^{\star}\left(s_{t+1}, a\right)\).
- TD error: \(\delta_t=Q^{\star}\left(s_t, a_t\right)-y_t\).
- Update: \(\quad Q^{\star}\left(s_t, a_t\right) \leftarrow Q^{\star}\left(s_t, a_t\right)-\alpha \cdot \delta_t\).
算法:
实现代码
1 | class QLearningTable: |
DQN(网络形式)
学习目标:更新网络参数\(w\),学习最优动作价值函数\(Q^\star\)
局限性:动作要求是离散的,当动作维度增大时,神经网络的规模会指数增加
利用神经网络 DQN, \(Q(s, a ; \mathbf{w})\) 近似 \(Q^{\star}(s, a)\),用神经网络拟合状态到Q值之间的映射关系。状态作为神经网络的输入,可以在连续范围内取值,最终输出得到的是该状态下对应每个动作的Q值,然后我们可以在其中选择一个令Q值最大的作为最优动作。
网络的输入为State,输出为各Action的Q
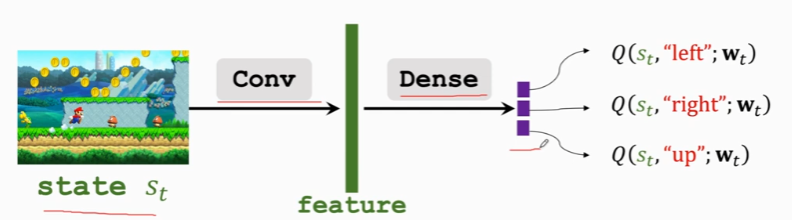
通过DQN网络输出的最大Q值的动作 \(a_t=\underset{a}{\operatorname{argmax}} Q\left(s_t, a ; \mathbf{w}\right)\)控制agent做动作
- Observe a transition \(\left(s_t, a_t, r_t, s_{t+1}\right)\).
- TD target: \(y_t=r_t+\gamma \cdot \max _a Q\left(s_{t+1}, a;w\right)\).
- TD error: \(\delta_t=Q\left(s_t, a_t;w\right)-y_t\).
- Loss: \(L_t=\frac{1}{2}[Q(s_t,a_t;w)-y_t]^2\)
- Update: \(w \leftarrow w-\alpha \cdot \delta_t\cdot\frac{\partial Q(s_t,a_t;w)}{\partial w}\).
Multi-Step TD Target
Sarsa vs Q-learning
Sarsa 训练动作价值函数(action-value function)\(Q\pi(s,a)\)
TD Target: \(y_t=r_t+\gamma \cdot Q_\pi\left(s_{t+1}, a_{t+1}\right)\)
Q-Learning训练最优动作价值函数(optimal action-value function)\(Q^\star (s,a)\)
TD Target: \(y_t=r_t+\gamma \cdot \max _a Q^{\star}\left(s_{t+1}, a\right)\)
前面学习的Sarsa以及Q-Learning都是只使用一个transition\((s_t,a_t,r_t,s_{t+1})\) 其中包含一个reward,称为One-Step TD Target
此外可以同时使用多步transition中的\(r_t,r_{t+1},r_{t+2}...r_{t+m-1}\)进行更新,这样比单步的学习效果更好。由于包含多步reward,因此Q值更加接近于真实值
数学推导
\[ \begin{aligned} U_{t}&=R_{t}+\gamma \cdot U_{t+1} \\&=R_{t}+\gamma \cdot R_{t+1}+\gamma^{2} \cdot U_{t+2} \\&=R_{t}+\gamma \cdot R_{t+1}+\gamma^{2} \cdot R_{t+2}+\gamma^{3} \cdot U_{t+3} \end{aligned} \]
Identity: \(U_{t}=\sum_{i=0}^{m-1} \gamma^{i} \cdot R_{t+i}+\gamma^{m} \cdot U_{t+m} .\)
m-step TD target应用于Sarsa算法 \[ y_{t}=\sum_{i=0}^{m-1} \gamma^{i} \cdot r_{t+i}+\gamma^{m} \cdot Q_\pi(s_{t+m},a_{t+m}) . \]
m-step TD target应用于Q-Learing算法 \[ y_{t}=\sum_{i=0}^{m-1} \gamma^{i} \cdot r_{t+i}+\gamma^{m} \cdot \max _aQ^\star(s_{t+m},a) . \]
如果将m设置为1,则为标准的Sarsa、Q-Learning算法
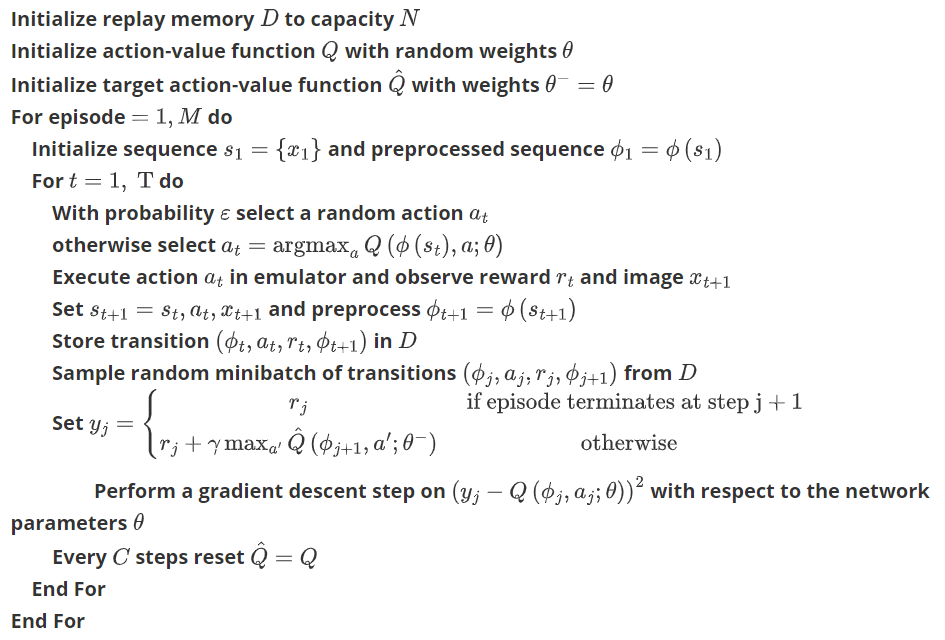
经验回放
在前面DQN+TD-Learning中依次利用各\(transition(s_t,a_t,r_t,s_{t+1}),t=1,2,..\)来更新网络参数\(w\),更新后丢弃此transition不再使用
在实际环境中\(s_t\) 与\(s_{t+1}\)之间有非常明显的相关性,这种相关性对模型的训练是有害的,如果能打散这种相关性,则有利于提升模型的训练效率
因此可以将最近的n条transition保存在一个大小为n队列(memory)中,如果memory满了,则利用最老的memory进行替换
Find \(\mathbf{w}\) by minimizing \(L(\mathbf{w})=\frac{1}{T} \sum_{t=1}^T \frac{\delta_t^2}{2}\).
Stochastic gradient descent (SGD): (一般使用mini-bach的方法,抽取一组transition,计算loss的平均值来更新网络参数)
- Randomly sample a transition, \(\left(s_i, a_i, r_i, s_{i+1}\right)\), from the buffer.
- Compute TD error, \(\delta_i\).
- Stochastic gradient: \(\mathbf{g}_i=\frac{\partial \delta_i^2 / 2}{\partial \mathbf{w}}=\delta_i \cdot \frac{\partial Q\left(s_i, a_i ; \mathbf{w}\right)}{\partial \mathbf{w}}\)
- SGD: \(\mathbf{w} \leftarrow \mathbf{w}-\alpha \cdot \mathbf{g}_i\).
特点:
- 可重复利用历史transition,记忆库 (用于重复学习)
- 打破transition之间的相关性,暂时冻结
q_target参数 (切断相关性)
算法
1 | # 计算DQN的reward |
神经网络与思维决策
搭建两个神经网络(见高估问题 Target Network)
- Target Network 用于计算值TD Target, 不会及时更新参数
- DQN用于控制agent做运动,并收集transition, 这个神经网络拥有最新的神经网络参数.
1 | # 定义网络结构,三层神经网络 |
优先经验回放
前面的算法在抽样时平等的看待每条transition,但是真实环境中每条transition的重要性是不同的,利用带权重的抽样来代替均匀抽样体现不同transition的重要性
Option 1: Sampling probability \(p_t \propto\left|\delta_t\right|+\epsilon\).
Option 2: Sampling probabilit \(p_t \propto \frac{1}{\operatorname{rank}(t)}\).
- The transitions are sorted so that \(\left|\delta_t\right|\) is in the descending order.
- \(\operatorname{rank}(t)\) is the rank of the \(t\)-th transition.
TD Error \(|\delta_t|\)越大表示transition被抽到的概率也就越大
不同的transition有不同的抽样概率,这样会导致DQN的预测有偏差,需要相应的调整学习率,较大的抽样概率应该将learning-rate降低。
Scale the learning rate by \(\left(n p_t\right)^{-\beta}\) where \(\beta \in(0,1)\)
需要记录每条transition的TD Error \(\delta_t\),如果一条transition刚收集到并不知道\(\delta_t\),则直接设置为最大值(最高的权重) \[ \begin{aligned} &\begin{array}{ccc} \text { Transitions } &\text {Sampling Probabilities } &\text {Learning Rates } \\ \ldots & \ldots & \ldots \\\left(s_t, a_t, r_t, s_{t+1}\right), \delta_t & p_t \propto\left|\delta_t\right|+\epsilon & \alpha \cdot\left(n p_t\right)^{-\beta} \\ \left(s_{t+1}, a_{t+1}, r_{t+1}, s_{t+2}\right), \delta_{t+1} & p_{t+1} \propto\left|\delta_{t+1}\right|+\epsilon & \alpha \cdot\left(n p_{t+1}\right)^{-\beta} \\ \left(s_{t+2}, a_{t+2}, r_{t+2}, s_{t+3}\right), \delta_{t+2} & p_{t+2} \propto\left|\delta_{t+2}\right|+\epsilon & \alpha \cdot\left(n p_{t+2}\right)^{-\beta} \\ \ldots & \ldots & \ldots \end{array} \end{aligned} \] 越高的TD Error \(|\delta_t|\) ,更高的概率(权重)被选择,更小的learning-rate
高估问题
TD Learning会导致DQN高估动作价值(action-value),由于以下两个原因
- 计算TD Target时,\(y_t=r_t+\gamma \cdot \max _a Q\left(s_{t+1}, a;w\right) .\)用到了最大化操作,导致TD Target大于真实值
- Bootstrapping,计算TD Target时,利用了t+1时刻的网络估计
两个原因导致高估问题越来越严重(恶性循环)
非均匀的高估会导致问题,例如某一时刻: \[ \begin{aligned} & Q^{\star}\left(s, a^1\right)=200, Q^{\star}\left(s, a^2\right)=100, and\ Q^{\star}\left(s, a^3\right)=230 \\ & Q\left(s, a^1 ; \mathbf{w}\right)=280, Q\left(s, a^2 ; \mathbf{w}\right)=300, Q\left(s, a^3 ; \mathbf{w}\right)=240 . \end{aligned} \]
Then \(a^2\) (which is bad) will be selected.
Target Network
核心思想:利用一个Target Network计算TD
Target network: \(Q\left(s, a ; \mathbf{w}^{-}\right)\)
- 与 DQN, \(Q(s, a ; \mathbf{w})\) 具有相同的网络结构.
- 但网络参数不同 \(\mathbf{w}^{-} \neq \mathbf{w}\).
利用 \(Q(s, a ; \mathbf{w})\) 控制agent做运动,并收集transition: \[ \left\{\left(s_t, a_t, r_t, s_{t+1}\right)\right\} . \]
利用Target Network \(Q\left(s, a ; \mathbf{w}^{-}\right)\) 计算TD target: \[ y_t=r_t+\gamma \cdot \max _a Q\left(s_{t+1}, a ; \mathbf{w}^{-}\right) . \]
Target Network参数更新(每隔一段时间):
- Option 1: \(\mathbf{w}^{-} \leftarrow \mathbf{w}\).(直接赋值)
- Option 2: \(\mathbf{w}^{-} \leftarrow \tau \cdot \mathbf{w}+(1-\tau) \cdot \mathbf{w}^{-}\).(做加权平均)
Double DQN
核心思想:利用Double DQN缓解因为maximization导致的高估
原始方法计算TD Target \[ y_t=r_t+\gamma \cdot \max _a Q\left(s_{t+1}, a ; \mathbf{w}\right) . \] 计算TD Target的过程可以分解为两步
选择action: \(a^{\star}=\underset{a}{\operatorname{argmax}} Q\left(s_{t+1}, a ; \mathbf{w}\right) .\)
计算TD Target: \(y_t=r_t+\gamma \cdot Q\left(s_{t+1}, a^{\star} ; \mathbf{w}\right) .\)
原始方法中两步均使用DQN,Target Network方法中两步均使用target-net。
Double DQN 第一步使用DQN选择aciton,第二步使用target-net计算TD Target
Selection using DQN: \[ a^{\star}=\underset{a}{\operatorname{argmax}} Q\left(s_{t+1}, a ; \mathbf{w}\right) . \]
Evaluation using target network: \[ y_t=r_t+\gamma \cdot Q\left(s_{t+1}, a^{\star} ; \mathbf{w}^{-}\right) . \] 通过Double DQN的方法大幅提高性能,减少maximization带来的高估问题(但没有彻底根除)
| Selection | Evaluation | |
|---|---|---|
| Naive Update | DQN | DQN |
| Using Target | Target Network | Target Network |
| Double DQN | DQN | Target Network |
Dueling Network
Advantage Function
Discounted return: \(U_t=R_t+\gamma \cdot R_{t+1}+\gamma^2 \cdot R_{t+2}+\gamma^3 \cdot R_{t+3}+\cdots\)
Action-value function: \(Q_\pi\left(s_t, a_t\right)=\mathbb{E}\left[U_t \mid S_t=s_t, A_t=a_t\right] \text {. }\)
State-value function: $ V_(s_t)=_A$
Optimal action-value function: \(Q^{\star}(s, a)=\max _\pi Q_\pi(s, a) \text {. }\)
Optimal state-value function: \(V^{\star}(s)=\max _\pi V_\pi(s) \text {. }\)
Definition: Optimal advantage function.(优势函数) \[ A^{\star}(s, a)=Q^{\star}(s, a)-V^{\star}(s) \text {. } \] \(V^{\star}(s)\)评价状态s的好坏,\(Q^{\star}(s, a)\)评价在状态s的情况下做动作a的好坏
\(A^{\star}(s, a)\)表示动作a相对于baseline的优势,a越好,优势越大
经过数学推导得到以下两个等式
- Equation 1: \(Q^{\star}(s, a)=V^{\star}(s)+A^{\star}(s, a)\).
- Equation 2: \(Q^{\star}(s, a)=V^{\star}(s)+A^{\star}(s, a)-\max _a A^{\star}(s, a)\).
\(\max _a A^{\star}(s, a)\) 恒等于0,在训练中能保持神经网络的稳定,避免\(V^{\star}(s;w),A^{\star}(s, a;w)\)两个神经网络的输出随意上下波动
对于Equation 2 \[ Q^{\star}(s, a)=V^{\star}(s)+A^{\star}(s, a)-\max _a A^{\star}(s, a) \]
- 利用神经网络\(V\left(s ;
\mathbf{w}^V\right)\)近似\(V^{\star}(s)\)
- 利用神经网络\(A\left(s, a ; \mathbf{w}^A\right)\)近似\(A^{\star}(s, a)\)
因此 \(Q^{\star}(s, a)\)
可以利用dueling network表示为: \[
Q(s, a ; \mathbf{w}^A, \mathbf{w}^V)=V(s ; \mathbf{w}^V)+A(s, a ;
\mathbf{w}^A)-\max _a A(s, a ; \mathbf{w}^A) ..
\] 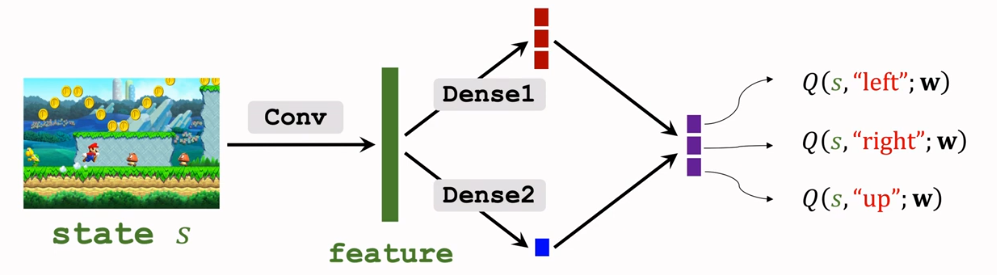
红色对应\(A(s, a ; \mathbf{w}^A)\), 蓝色对应\(V(s ; \mathbf{w}^V)\),将蓝色实数与上面向量每个元素相加,再减去红色向量中的最大元素得到紫色向量(最终输出)
Dueling Network的输入输出、功能、训练方式(TD Learning)、优化方法(Experience Replay, Target Network,double DQN)与DQN完全一样
Dueling Network改变了网络结构,提高了训练效果,此外在实际训练中max可以取mean,有更好的效果 \[ Q(s, a ; \mathbf{w})=V(s ; \mathbf{w}^V)+A(s, a ; \mathbf{w}^A)-\operatorname{mean}_a A(s, a ; \mathbf{w}^A) . \]




